Computer Vision Project 1: Image Alignment and Color Compositing
Goal:
Take the digitized Prokudin-Gorskii glass plate images and automatically produce a color image with as few visual artifacts as possible. Extract the three color channel images and align them so that they form a single RGB color image.Baseline (Naive) Implementation:
To align the RGB images, I decided to use the Normalized Cross Correlation metric as a baseline, because I noticed that it outperfomed sum of squared differences (SSD) on a small sample of test images.
My program divides the image into 3 equal parts, aligns the second and the third parts (G and R) to the first (B).
For each image, I record the displacement vector that was used to align the parts.
Sample Single-Scale Processing Results
NCC final image |
G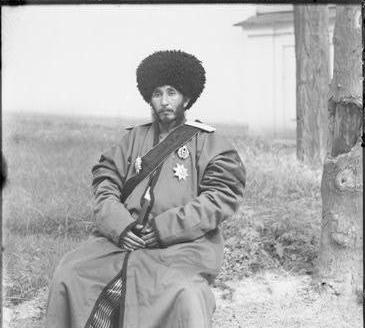 |
R |
B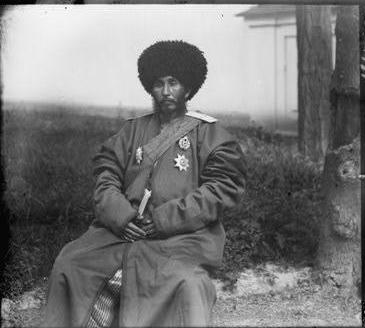 |
However, since exhaustive search becomes expensive if the displacement search range/image resolution are too large, I implemented a second method for the high-res images: a multi-scale aligning algorithm that searches over a user-specified window of displacements.
Image Pyramids
To handle alignment for larger images, I used image pyramids to implement a faster search algorithm. Given two images, my image pyramid alignment algorithm recursively resizes images by factors of 2 at multiple scales, averages them by taking a uniform average of each, and respectively aligns them from the coarsest scale to the finest scale (largest image).
Image Pyramid Sample Results (from high res. scans)
 |
 |
 |
Bells and Whistles: Cropping with Edge Detection
Our overall goal is to reduce boundary noise in the dataset; thus, we need to crop the colorful, shifted borders. Hence, I used a combination of edge detection and averages to compute the cropping dimensions for each image. After generating the final color image by the alignment algorithms above, I use the following algorithm to crop the final image based on those computed dimensions.
Cropping Algorithm
Input: channel image I
- Run edge detection on I to create an edge response map
- average the edge response map horizontally to make vector V_h with length = image's height
- calculate a threshold equal to 2 standard deviations above the mean over all values in V_h
- sequentially search the first tenth of values in V from right to left, getting the first value that's higher than the threshold
- sequential search from left to right over the last tenth of V_h
- Save indices as the top and bottom cropping bounds
- Do similar search with V_v, vector generated by vertical average of edge response map to get left and right cropping bounds
Cropping and Edge Detection
Original R |
Edge Detection Map |
Cropped R |
Sample Cropping Results
Before |
After |
Before |
After |
(More) Sample Results
 |
 |
 |
 |